
![]()
Overall Efficiency Grade: 69.25
Mobility, Flexibility & Stability Screening
Putz’s thoracic mobility falls in the “tight” category, approaching “stiff”. He turned 40 degrees in both directions. His hip mobility falls in the “tight” category as well. His right hip IR was 50 degrees, and right hip ER was 50 degrees. His left hip IR was 45 degrees and ER was 45 degrees. In terms of patterning his loading mechanism, smaller moves will suit him best.
He struggled during the pelvic tilt, pelvic rotation, and torso rotation tests. This should be a focus of his mobility/prep plan, to create proper disassociating movements. This will help inhibit energy loss as it moves from his legs to his core, if he can separate his lower body and upper body independent of each other.
He failed the overhead squat test, but was able to pass the squat test with his arms behind his head. This points to thoracic flexion and extension as his limiting factor here. His hip, knee, and ankle mobility all were fine, as he passed the squat test with his arms behind his head.
His scapular region is under-developed and should be a major focus of his strength plan. His scapular retraction was 3 1/2” on the right side, and 3 1/2” on the left side, which would put him in the “neutral” category, approaching tight. He will require a very small range of motion to get into a scap load. Shoulder flexion was good, and internal and external rotation was good. During his reach, roll, and lift test, his arms began to bend, which is the biceps compensating for weak scapular stability.
His lower body showed good stability during the glute bridge test, and he also showed good core stability during anti-rotation. He failed his single leg balance test on both legs, although not by much. This can affect his loading mechanism, because if he is on one leg for an extended period of time, he could rush the loading mechanism which would affect timing. Also, instability in the landing leg will inhibit quick energy transfer from the ground. He showed good flexibility in his hamstrings, and proper ability to hip hinge during the toe touch test.
All wrist, forearm, and cervical screens were a pass. His side bend numbers were adequate on the right side, at 40 degrees. However, he is limited to his left at just 30 degrees.
Force Plate Jumps
Carter has a unilateral leg bias in his right leg that is in the “watch” stage. The bias ranged from 30-10% per jump. The unilateral balance will need to be addressed with strength and conditioning. Counter movement jumps were slightly lower than the squat – pause jumps at 250% BW for CMJ and 272% for SJ. This indicates his body prefers to transfer energy over a longer period of time.
Force Plate Swings
Below is video of the swing analysis. I will walk you through this matched up with video.
Carter loads into the ball of his foot and creates a good amount of back leg loading force at 98% BW. He does externally rotate his back toes in his stance which lowers his back leg torque number to 37 Newtons, which is much lower than the 45 Newtons preferred. He is fairly unique in that he doesn’t create speed, one or two ways. He uses a combination of all 3 forces: vertical, horizontal and torque. His front leg, however, dissipates force over a longer period of time than ideal. When Carter commits to the ball, ideally the front leg has more of an intense interaction with the ground. Horizontal force was 55% of BW, Z axis vertical force was 143% BW and torque force was 103 Newtons. The X and Z axis are fairly low, and the torque number is good.
KVEST Sequencing & Rotational Speeds
The 3d readings are on kinematic sequencing and rotational speeds.
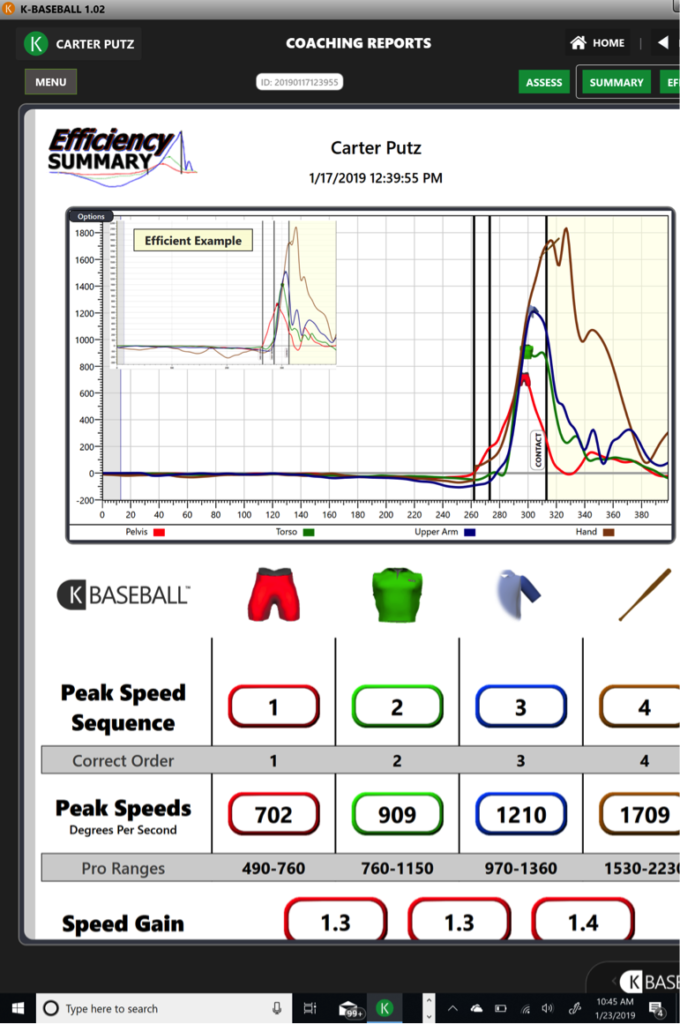
Carter has a well sequenced swing which coincides with producing high torque force. He has quick hip deceleration but slower core deceleration which would indicate some minor core instability. Hip rotational speeds are 700 deg/sec. which rates as “good” on Real Speed graph. Energy transfer to the core “average” at 920 deg/second. With a more forceful front heel interaction with the ground, that energy transfer should improve. Lead arm values build well at 1210 deg/sec. and wrist speeds were good at 1700 deg/sec.
Bat Sensor Data
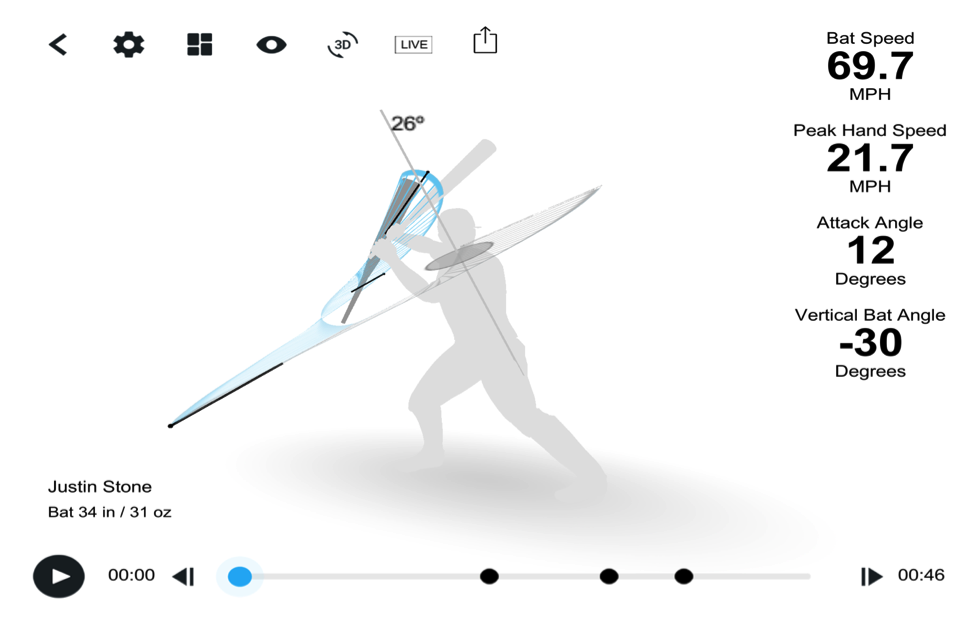
Bat speed was average and ranged from 68-72mph. Rotational acceleration was average at 11-12 G’s. I feel like he can increase that with more front leg aggressiveness. Time to impact was also average at 150-160 milliseconds. Attack angles to the ball were good at 6-10 degrees and he maintains posture through the turn as you can see below. The bat stays in a true arc.
Summary & Recommendations
- Utilize the front leg more for faster rate of force production. The feeling of “punching” the ground with the front heel once it interacts with the ground.
- Straighten back foot for more back leg torque since this is preferred method of creating speed.
 PRIVATE LESSONS
PRIVATE LESSONS CLASSES
CLASSES CAMPS
CAMPS ELITE TEAMS
ELITE TEAMS ELITE BASEBALL TV
ELITE BASEBALL TV VIDEO ANALYSIS
VIDEO ANALYSIS BIOTECH CAGE
BIOTECH CAGE SHOWCASE
SHOWCASE