
![]()
Overall Efficiency Grade: 65.625
Mobility, Flexibility & Stability Screening
Russ is in the “neutral mover” category. His thoracic mobility was nuetral at 55 degrees of rotation to the right and left. He has pelvic control in his pelvic tilt isolation which will allow energy transfer into the upper body. He has vibration in that test which indicates the lower abs are more developed than the lower back. He was limited the pelvic rotation test, which indicates that he will have limited ability to disassociate his upper and lower body very efficiently. Torso disassociation was limited as well. If he gets better dissociation, he will have the ability to create energy transfer through torque.
Russ failed the overhead squat test with limited ankle mobility. He has core instability which will affect energy transfer speed up the chain. This should be a focus if you do the strength plan.
He has an under-developed scapular region, which will help reduce torque through his upper body anchor. His scapular retraction was in the “neutral” category. Shoulder flexion was good, as was external rotation. Internal shoulder rotation was tight on the right arm, which is common on the throwing arm.
Hip rotational mobility was “neutral.” He was able to turn 45 degrees in the right and left hip internally. Externally, he was 35 degrees on the right and the left.
His lower body showed limited left and right leg stability, and his glutes stabilized very well during the glute bridge test.
All wrist and cervical screens were a pass.
Force Plate Jumps
Force plate jumps showed good unilateral balance between legs. The rate of force development was more prominent on the squat-pause jumps than the counter movement jump by a score of 290% body weight to 264% body weight. This indicates a longer loading mechanism is appropriate for Russ as his body prefers to translate energy over a longer period of time.
Force Plate Swings – Right Handed
Russ loads in the ball of his back foot. Back leg loading numbers are slightly low at 94% of his body weight and he holds that well into his forward advance.
Front leg force was good but the rate of force production was average. He has 200% of BW in his front leg. 200% is the number we are trying to hit. He’ll need a more violent interaction with the ground with his front heel, once it plants. His preferred method of creating speed is torque force. He has 49 Newtons of torque in his back leg, which is higher than the 45 Nm we are looking for. He strides slightly across his body and creates 175 Nm of front leg torque, which is very high. His front leg resisting force on the x axis is 75% BW, which good. However, the x-axis timing number is 50% which shows he’s accepting weight into his front leg prior to making the turn. This will make him lose energy and reduce adjustability. We want him to stay anchored to the ground with the back heel until the turn transfers that weight into his front side.
Force Plate Swings – Left Handed
Russ loads in the ball of his back foot. Back leg loading numbers are slightly low at 93% of his body weight and he loses some of that into his forward advance.
Front leg force was good, as was the rate of force production. He has 180% of BW in his front leg. 200% is the number we are trying to hit. His preferred method of creating speed is torque force. He has 22 Newtons of torque in his back leg, which is lower than the 45 Nm we are looking for. The reason being, is he inwardly rotates his back foot, which lowers the torque. He strides slightly across his body and creates 115 Nm of front leg torque, which is high. His front leg resisting force on the x axis is 75% BW, which good. However, the x-axis timing number is 10% which shows he’s accepting weight into his front leg prior to making the turn. This will make him lose energy and reduce adjustability. We want him to stay anchored to the ground with the back heel until the turn transfers that weight into his front side.
KVEST Sequencing & Rotational Speeds – Right Handed
The 3d readings are on kinematic sequencing and rotational speeds.
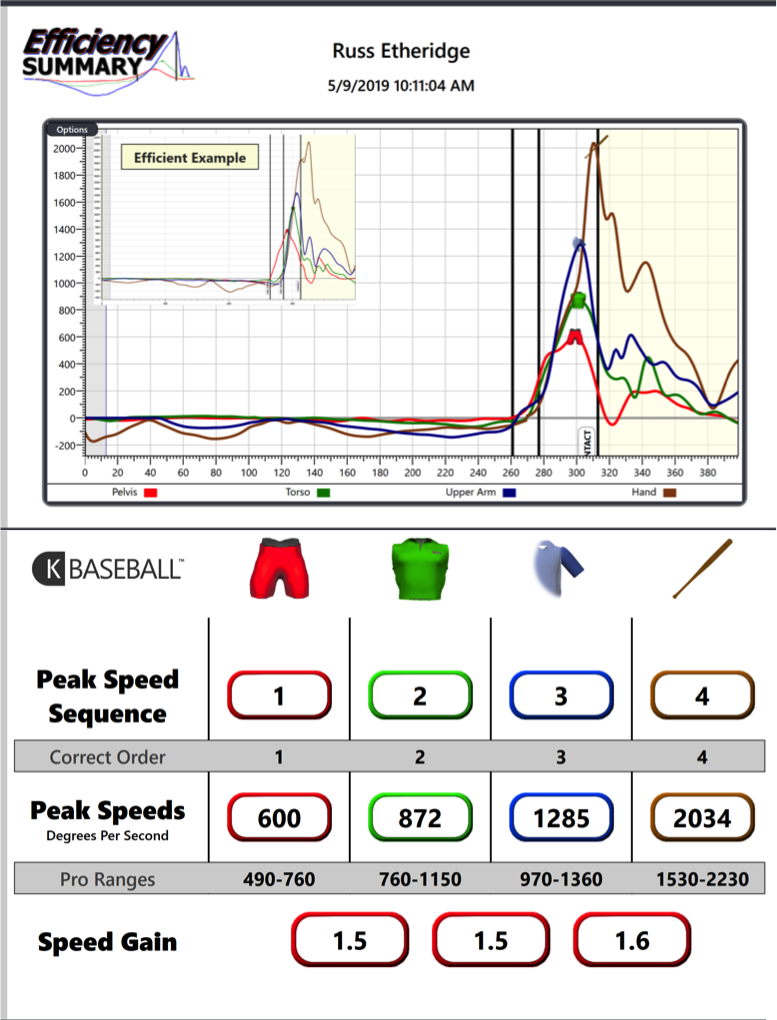
Turn speeds are average on our “Real Speed” scale. Hip turn speed of 600 deg/sec is average on our “Real Speed” scale. He gets good build in hip to core and core to lead arm transfer but could add more with better core stability. Torso speeds of 870 deg/sec is Average on the Real Speed scale. Lead arm values get good build at at 1250 deg/sec and wrist speeds are good at 2000 deg/sec. Kinematic sequences were good with the body, but showed length with the swing. This means he needs to hold his scap load better and reduce inward rotation of the shoulder.
KVEST Sequencing & Rotational Speeds – Left Handed
The 3d readings are on kinematic sequencing and rotational speeds.
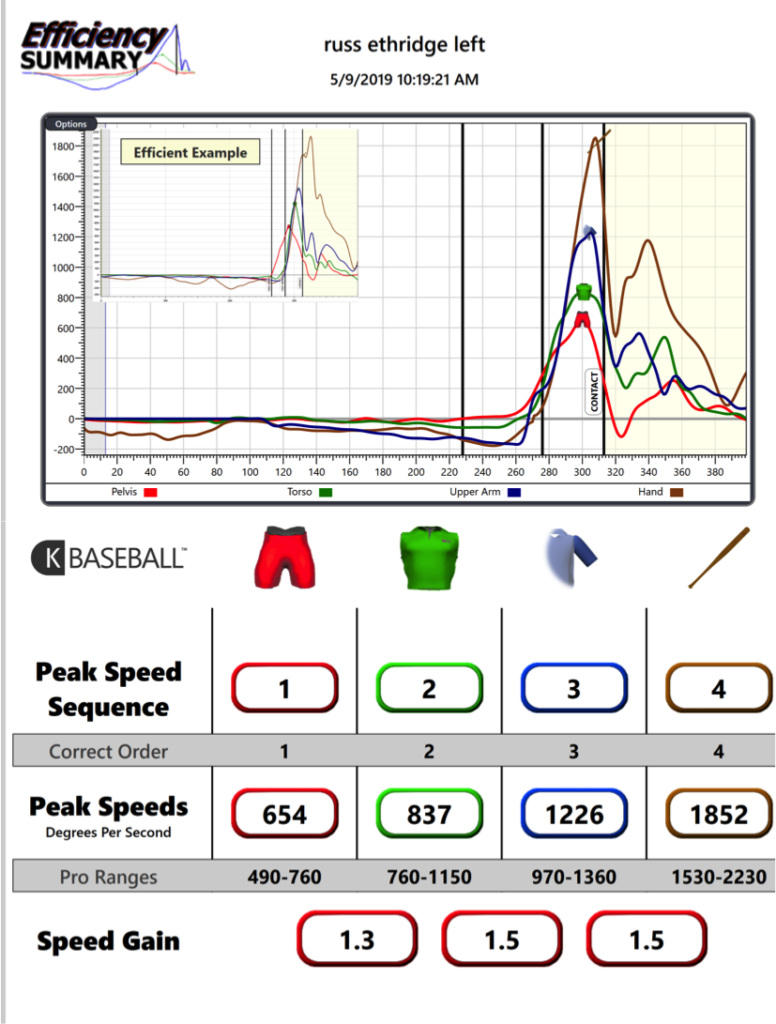
Turn speeds are average on our “Real Speed” scale. Hip turn speed of 600 deg/sec is average on our “Real Speed” scale. He gets good build in hip to core and core to lead arm transfer but could add more with better core stability. Torso speeds of 870 deg/sec is Average on the Real Speed scale. Lead arm values get good build at at 1250 deg/sec and wrist speeds are good at 2000 deg/sec. Kinematic sequences were good with the body, but showed length with the swing. This means he needs to hold his scap load better and reduce inward rotation of the shoulder.
Bat Sensor Data
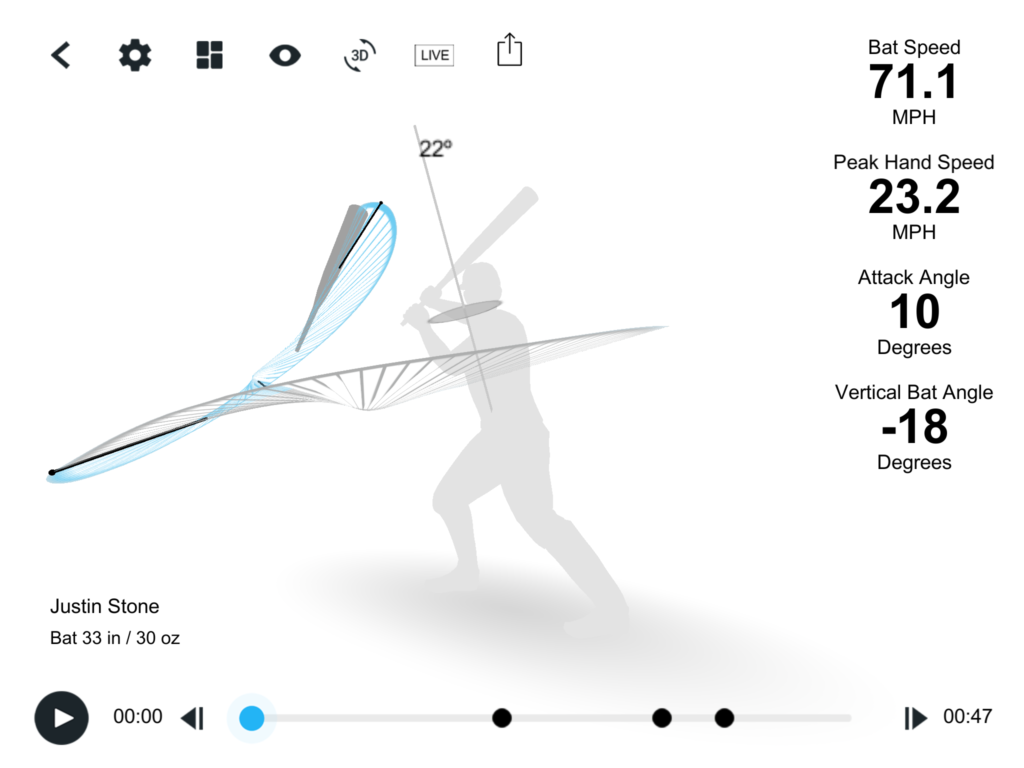
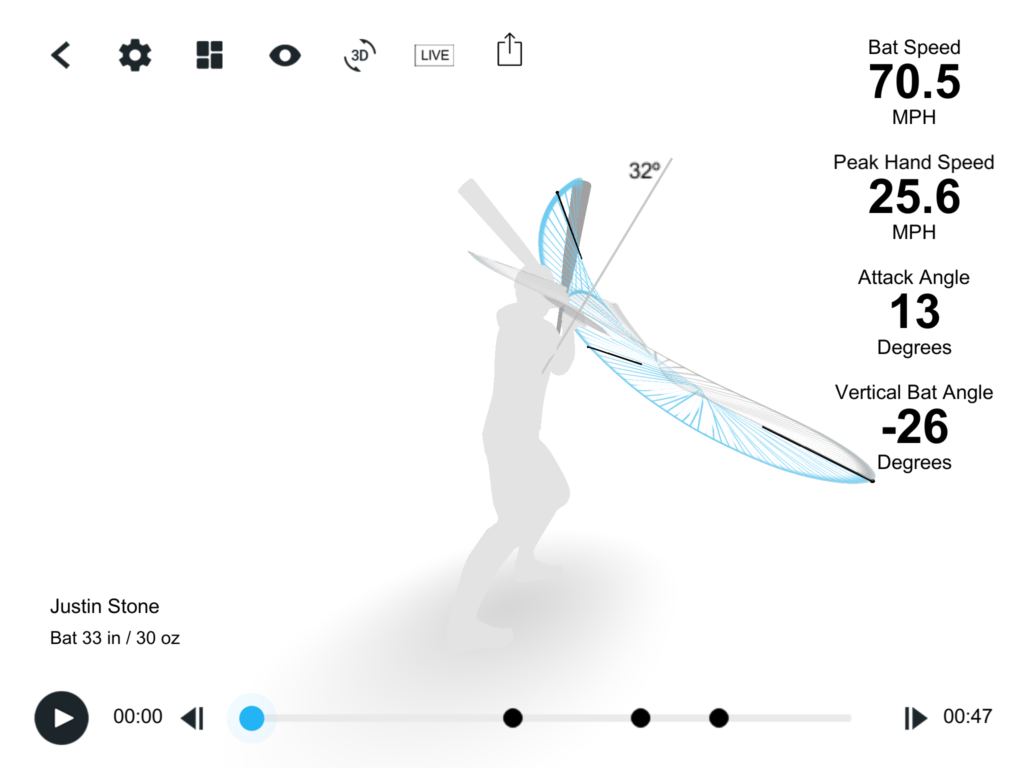
Bat speeds were average for age at 71 mph on both sides of the plate on a Blast sensor. Attack angles to the ball were good at 8-10 degrees. Peak hand speeds were 20 mph which is average. Time to impact was good at 170 milliseconds Bat plane is excellent from the left side but cuts off from the right side. The cut off is normal when you have length at the beginning, as the rest of the path is compensating for the earlier length.
Summary & Recommendations
- Follow the strength plan to fix the scapular winging and core instability.
- Improve front foot interaction with the ground with a more forceful heel plant. This will improve overall speed in the swing.
- Improve length in swing – use the PVC progression for that.
- Limit inward rotation from both sides of plate.
 PRIVATE LESSONS
PRIVATE LESSONS CLASSES
CLASSES CAMPS
CAMPS ELITE TEAMS
ELITE TEAMS ELITE BASEBALL TV
ELITE BASEBALL TV VIDEO ANALYSIS
VIDEO ANALYSIS BIOTECH CAGE
BIOTECH CAGE SHOWCASE
SHOWCASE